![]() Modeli: D10 2D LiDAR
Modeli: D10 2D LiDAR
MANUAL PËR PËRDORIM
FILLIM I SHPEJTË
Sigurohuni që drejtuesi USB është i instaluar dhe lidhni kabllon USB në PC,
Lidheni pajisjen me furnizimin me energji elektrike (+5V±10%, 3A),
Drejtoni softuerin tonë për marrjen dhe analizimin e të dhënave,
Pastaj zgjidhni portën e duhur të komunikimit dhe vendosni shpejtësinë e zhurmës në 921600 bps.
Shtypni butonin e fillimit ” ” dhe filloni të punoni!
(Versioni V8.01.8)
Për më shumë informacion dhe mbështetje, ju lutemi vizitoni http://www.top1sensor.com
Specifikimet
| Artikuj | Parametrat |
| Gama e skanimit 1 | 0.15m-10m, 6m@10% |
| Gabim në matje 2 | ±3CM@IOM@I0Hz |
| Gama e këndit të skanimit | 360° |
| Rezolucioni i këndit | 0.28° |
| Frekuenca e skanimit 3 | 10 Hz |
| Frekuenca e matjes | 14.28 Khz |
| Ndërfaqja e daljes | TTL |
| Zgjidhja e distancës | 1 cm |
| Burimi lazer | Diodë lazer 905nm, <1mW; në përputhje me GB7247.1-2001 Kërkesat e sigurisë së syve me lazer të klasës 1 |
| Furnizimi me energji elektrike | DC 5V±10%, Konsumi i energjisë < 3W Rryma e nisjes > 1.5A |
| Vëllimi | 78x78x56 mm |
| Gama e temperaturës së funksionimit | – 10°C- +50°C |
| Gama e temperaturës së ruajtjes | – 20°C- +70°C |
| Niveli i mbrojtjes | IP54 |
| Pesha | 190 g |
| Jeta e punës | 50,000 orë në kushte standarde |
Shënime:
- Një objekt me reflektim vetëm 10% dhe ngjyrë të errët që mund të matet 6 m, Kadari i bardhë deri në 10 m
- Saktësia e përsëritshmërisë së matjes është ±3 cm kur diapazoni i matjes arrin 10 m dhe frekuenca e skanimit është 10 Hz.
- Shpejtësia e parazgjedhur e rrotullimit është 10 rrotullime për sekondë
Vizatim dimensional
2.1 Rendering

2.2 Dimensionet

Instalimi dhe lidhja
3.1 Instalimi

3.2 Lidhja
3.2.1 Diagrami i lidhjes

3.2.2 Përkufizimet e kabllit lidhës 10 pin
| Pin | Funksioni | Ngjyra | Shënime |
| 0 | +5V±10% | E kuqe | Furnizimi me energji DC +5V |
| 1 | GND | E bardha | Toka me fuqi DC |
| 2 | Tx | E verdha | Lidhu me TTL Rx të jashtëm |
| 3 | Rx | E gjelbër | Lidhu me TTL Tx të jashtëm |
| 4 | GND | E zezë | Lidhu me GND të brendshme |
3.2.3 Furnizimi me energji elektrike
Furnizimi me energji elektrike +5V± 10%. Vëllimi i fillimittage duhet të jetë 5V, rryma fillestare duhet të jetë 1500 mA, rryma normale e punës është 500 mA. Megjithatë koeficienti i valëzimit të furnizimit me energji nuk duhet të jetë më i madh se 40 mV. Cilësimi i fabrikës është që D10 të fillojë automatikisht të rrotullohet pas ndezjes
Vendosja e softuerit
4.1 Instalimi i shoferit
Pasi drejtuesi USB të jetë instaluar me sukses, lidhni Lidarin me kompjuterin për të konfirmuar që e njeh portën com dhe më pas ndizni energjinë. Nëse fillimisht ndizet rryma dhe më pas lidhet, ekziston mundësia që miu i kompjuterit të dalë jashtë kontrollit. Ju lutemi kushtojini vëmendje sekuencës së funksionimit. Ekzekutoni "software exe file” dhe mund të përdoret normalisht.
Disa kompjuterë mund ta instalojnë automatikisht drejtuesin pasi të jetë lidhur LiDAR, nëse jo, shkarkoni drejtuesin CP210X në paketën tonë të softuerit.
4.2 Marrja e të dhënave
Për të ekzekutuar programin 'Favelas LiDAR Point Cloud Data Acquisition and Analysis System.exe', dritarja e cilësimeve të komunikimit (shih figurën 1) do të shfaqet. Së pari, zgjidhni pajisjen D10. Së dyti, zgjidhni numrin e portës serike që korrespondon me pajisjen, porta serike e lidhur me kompjuterin mund të identifikohet automatikisht nga programi. Së treti, zgjidhni baud rate 921600. Së katërti, klikoni 'Po' për të hyrë në ndërfaqen e monitorimit (shih figurën 2). Shpejtësia e Baud: 921600 bps, Biti i barazisë: Asnjë, Bitët e të dhënave: 8, Biti i ndalimit: 1

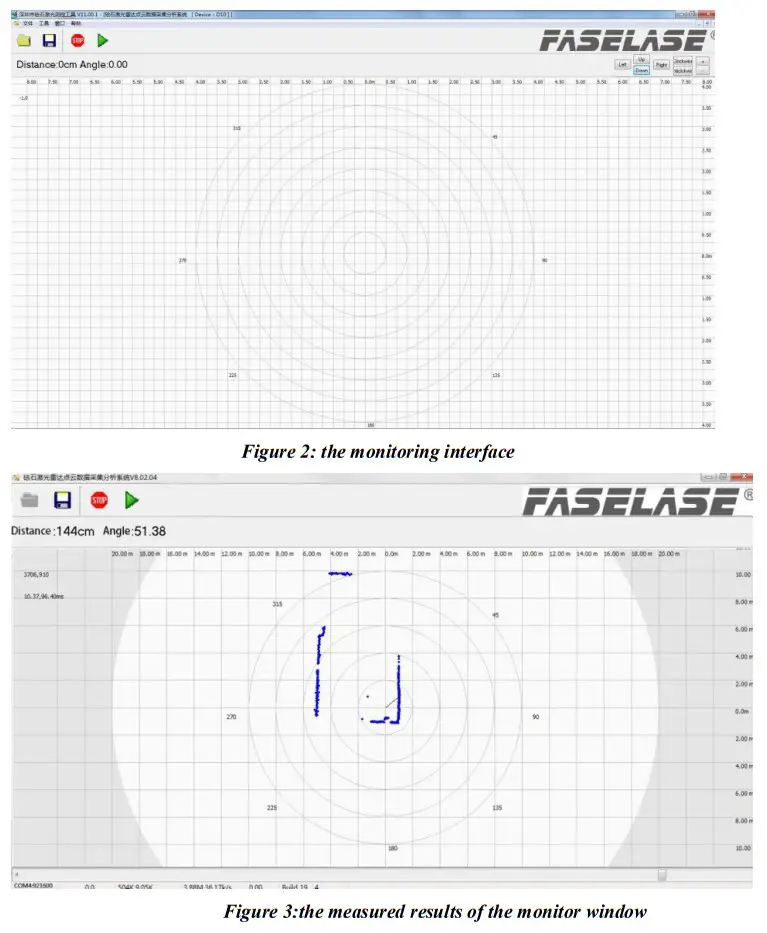
Klikoni ikonën e ruajtjes![]() për të shfaqur numrin e pikave të zbuluara në rrethin aktual dhe distancën dhe këndin e secilës pikë.
për të shfaqur numrin e pikave të zbuluara në rrethin aktual dhe distancën dhe këndin e secilës pikë.
Klikoni butonin e djathtë të miut në ndërfaqen e monitorit për të zgjedhur 'ekranin një dimensional' për të vëzhguar ndryshimet e të dhënave në kohë reale të çdo zbulimi rrethi.
Klikoni ikonën Ruaj![]() për të filluar regjistrimin e të dhënave të testit, për të vendosur emrin dhe shtegun, klikoni OK, për të përfunduar regjistrimin, klikoni përsëri butonin Ruaj, kliko Anulo në dritaren që shfaqet për të përfunduar regjistrimin e të dhënave.
për të filluar regjistrimin e të dhënave të testit, për të vendosur emrin dhe shtegun, klikoni OK, për të përfunduar regjistrimin, klikoni përsëri butonin Ruaj, kliko Anulo në dritaren që shfaqet për të përfunduar regjistrimin e të dhënave.
Të dhënat e regjistruara mund të hapen edhe duke klikuar Hapni Historinë File butonin
Protokolli i komunikimit
5.1 Formati i të dhënave dalëse
5.1.1 Prodhimi binar: 4 bajt, duke përfshirë vlerat e distancës dhe të këndit.
5.1.2 Çdo paketë e të dhënave e testimit të distancës ka 4 bajt (të etiketuara me radhë A, B, C dhe D.,
çdo bajt ka 8 bit, që korrespondojnë me A7, A6,…,A1,A0, B7,B6,…,B1,B0, C7,C6,…,C1,C0.dhe D7,D10,…,D1,D0.
5.1.3 MSB-të e 3 bajtit të parë janë 0 (A7, B7, C7), dhe MSB e bajtit të fundit është 1 (D7), që tregon fundin e paketës së të dhënave. Ka të dhëna të vlefshme 4*7 = 28 bit në çdo paketë të dhënash.
A6, A5, A4 të bajtit A janë biti i kontrollit. Për algoritmin specifik, ju lutemi kontrolloni algoritmin e kontrollit të të dhënave në pjesën tjetër.
A3, A2, A1, A0, B6, … B0, C6 janë vlerat e distancave të matura (gjithsej 12 bit), diapazoni i tij është 0~4000cm.
C5…C0, D6,…D0 janë vlerat e matura të këndit (gjithsej 13 shifra). Gama e saj është 0~5759, saktësia këndore është 1/16 gradë.
| Bit | A7 | A6 | A5 | A4 | A3 | A2 | Al | AO |
| Vlera | 0 | Kontrollo | Kontrollo | Kontrollo | Largësia | Largësia | Largësia | Largësia |
| Bit | B7 | B6 | B5 | B4 | B3 | B2 | B 1 | BO |
| Vlera | 0 | Largësia | Largësia | Largësia | Largësia | Largësia | Largësia | Largësia |
| Bit | C7 | C6 | C5 | C4 | C3 | C2 | C 1 | CO |
| Vlera | 0 | Largësia | Këndi | Këndi | Këndi | Këndi | Këndi | Këndi |
| Bit | D7 | D 10 | D5 | D4 | D3 | D2 | D1 | DO |
| Vlera | 1 | Këndi | Këndi | Këndi | Këndi | Këndi | Këndi | Këndi |
Algoritmi i kontrollit të të dhënave
Çdo karakter ka 8 bit (bit7~bit0), secili bit mund të jetë 0 ose 1. Bitët e kontrollit A6,A5,A4 ruajnë shumën e ulët 3 bit të 1 prej B,C,D 3 bajt, kur algoritmi i kontrollit, së pari merrni numrin e '1' në 3 bajt të B,C,D duke kërkuar tabelën dhe më pas mblidhni ato, dhe më pas krahasoni 3 bitet e poshtme të shumës me A6,A5,A4, nëse janë të qëndrueshme, nxirr rezultatet e matjes char pa nënshkruar GetCrcPackage4Byte (char i panënshkruar *buf)
{. shkronja e panënshkruar B,C,D;
B = buf[1];
C = buf[2];
D = buf[3];
//chit është një tabelë numrash prej 1 që korrespondon me 0-255 kubit statik të panënshkruar[256] = {
0,1,1,2,1,2,2,3,1,2,2,3,2,3,3,4,1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,
1,2,2,3,2,3,3,4,2,3,3,4,3,4,4,5,2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,
2,3,3,4,3,4,4,5,3,4,4,5,4,5,5,6,3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,
3,4,4,5,4,5,5,6,4,5,5,6,5,6,6,7,4,5,5,6,5,6,6,7,5,6,6,7,6,7,7,8,
};
kthimi (kubit[B]+kubit[C]+çit[D])&0x07; } ktheni 3 shifrat e ulëta shumën e 1 në 3 bajt të B,C,.D
Algoritmi i analizës së të dhënave
//buf është një tregues i paketës së të dhënave, i cili ruan 3 bajt si A, B, C sipas renditjes.
//vlera e distancës së kthimit, nëse kontrolli i të dhënave nuk është i saktë, ktheni -1
// Int Decode Lase Data (char *buf i panënshkruar)
{ Int distance; i panënshkruar char cordate = GetCrcPackage3Byte(buf);
//char i panënshkruar orgcrc = (buf[0]>>4)&0x07;
nëse (i përzemërt!= (buf[0]>>4))
kthimi -1; ;
//llogarit distancën. A0,B6..B0,C6…C0
. distanca = ((buf[0]&0x1)<<14)+(buf[1]&0x7F)<<7)+((buf[2]&0x7F)); distanca e kthimit;
}
//
//buf është një tregues i paketës së të dhënave, i cili ruan 4 bajt si A, B, C dhe D sipas renditjes.
//ktheje vlerën e distancës, nëse kontrolli i të dhënave nuk është i saktë, ktheje -1 typedef struct{ në distancë;
Int Angle;
}FSDNode;
bool DecodeFSD10(FSDNode *nodelist,char i panënshkruar *buf) { char cordate i panënshkruar = GetCrcPackage4Byte(buf);// llogarit 3 shifrat e ulëta shumën e 1 në 3 bajt të B,C,.D
char i panënshkruar orgcrcdata = (buf[0]>>4)&0x07;//merr çekun origjinal A6,A5,A4 if(orgcrcdata!= cordate) kthen false;
kënd i panënshkruar Int distance;
//llogarit distancën
distanca = (buf[0]&0x0F);
distanca <<= 7;
distanca += (buf[1]&0x7F);
distanca <<= 1;
nëse (buf[2]&0x40)
distanca ++; novelist->largësi = largësi;
//llogarit këndin
kënd = buf[2]&0x3F;
kënd <<= 7;
kënd += (buf[3]&0x7F);
novelist->Këndi = kënd;
kthehu i vërtetë;
Na kontaktoni për të marrë më shumë raste inxhinierike dhe paketa SDK që mbështesin drejtuesit e ROS.
Problem me të shtënat
Faktorët që ndikojnë në diapazonin e matjes
D10 është një pajisje matës optike, rezultatet e matjes së së cilës ndikohen nga faktorë mjedisorë. Prandaj, rezultati aktual i matjes mund të jetë i ndryshëm me vlerën tipike e cila matet në mjedisin standard.
Faktorët e mëposhtëm do të ndikojnë në diapazonin aktual të matjes.
| Faktorët | Duke ndikuar në rezultatin |
| Reflektimi me shumë rrugë | Rezultatet e gabuara të matjes mund të ndodhin kur energjia e lazerit e kthyer nga objektet e tjera tejkalon energjinë e kthyer nga objektivi |
| Sipërfaqe transparente | Rezultatet e gabuara të matjes mund të ndodhin kur objektivi i matjes janë lëngje ose gota pa ngjyrë |
| Objekt i vogël | Kur objekti i matur është më i vogël se pika e lazerit, ose lazeri mat këndin e objektit të matur, mund të shfaqen rezultate të pasakta të matjes. |
Pajisje standarde dhe opsionale
| Nr. | Artikuj | Sasia | Vërejtje |
| 1 | DI 0 | 1 pc | |
| 2 | Kabllo të dhënash | 1 pc | |
| 3 | Konvertuesi TTL në USB | 1 pc | |
| 4 | Përshtatës i rrymës DC +5V | 1 pc | Fakultative |
Na kontaktoni
Xi'an Hizon Tregtinë Ndërkombëtare Co, Ltd
http://www.top1sensor.com
Tel: +86-29-87858956
Faks: +86-29-87858956
Moby: +86-13201520716 Z. Yang
E-mail: contact@top1sensor.com
Shto: Nr.68 Sektori i Mesëm Jugor, Rruga Haunching, Xi'an, Kinë
Dokumentet / Burimet
 |
Sensori FASELASE D10 2D LiDAR [pdf] Manuali i Përdoruesit D10, D10 Bee Eyes navigimi me sensor 360 gradë, navigim me sensor 360 gradë, Sensori D10 2D LiDAR, D10, Sensori 2D LiDAR, Sensori LiDAR, Sensori |